文章目录(Table of Contents)
简介
最近在看 Reinforcement Learning with Human Feedback (RLHF) 的相关内容,而其中本次要介绍的 Deep TAMER 就是其中一个相关工作,他尝试将人的判断加入到训练过程中,学出一个类似 Q-function 的函数(文章里面称为 Reward Fucntion)来进行决策。
目前的强化学习需要大量与环境交互探索才可以获得一个好的效果。为了提升效率,一个方法是在训练的输入中加入人工的数据。之前的工作(TAMER)已经证明了加入人工数据之后的优异表现,但是这些工作没有考虑复杂的 state 下的结果,也没有使用 deep learning。
于是本文做出了下面两个方面的贡献:
- We propose specific enhancements to TAMER that enable its success in high-dimensional state spaces in a framework we call Deep TAMER.
- We quantify the performance difference between TAMER and the proposed technique in an environment with high-dimensional state features. We demonstrate Deep TAMER's success by using it and just 15 minutes of human-provided feedback to train an agent that performs better than humans on the Atari game of BOWLING - a task that has proven difficult for even state-of-the-art reinforcement learning methods.
参考资料
- Paper:Deep TAMER: Interactive Agent Shaping in High-Dimensional State Spaces
- Github-Tamer,非官方实现的代码,可以参考一下
importance weight的计算; - Github,Awesome RLHF,Github 上关于
RLHF资料的整理; - Gymlibrary-Bowling,环境 Bowling 的介绍;
Deep TAMER 介绍
整体框架介绍
Deep TAMER 的整体框架如下图所示。在本文中,作者使用的是 Atari game - BOWLING 环境:
- 首先 human 对看到的 agent 的动作进行一个打分,对 agent 的行为进行改变(A human observes an autonomous agent trying to perform a task in a high-dimensional environment and provides scalar-valued feedback as a means by which to shape agent behavior);
- 根据 human 的反馈,agent 优化一个网络 H,H 的目的是预测人类的反馈,最后根据 H 可以得到一个策略(Through the interaction with the human, the agent learns the parameters of a deep neural network, H, that is used to predict the human's feedback. This prediction then drives the agent's behavior policy);
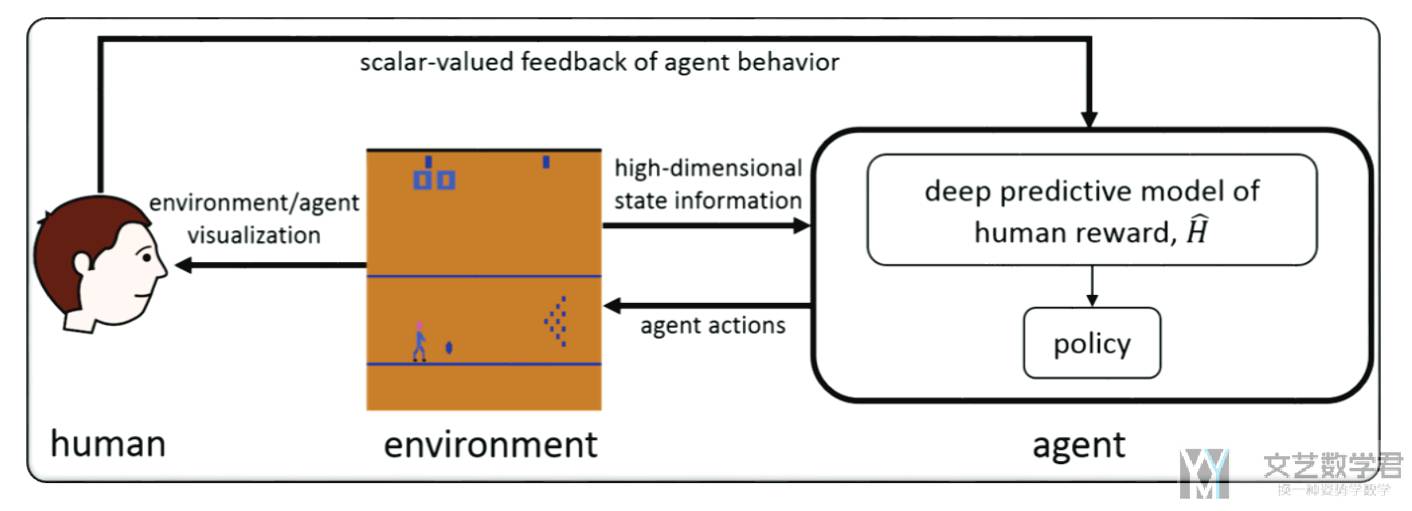
那么现在的问题就是,如何根据人类的反馈,来得到一个 human reward model,H。
Human Reward Model
这一部分我们讨论如何得到 reward function。假设 scalar-valued feedback signal 记为 h,这里 h 越大表示人对 agent 的动作越认可。我们假设人是根据当前 state 和 agent 做出的 action 给出的打分,也就是 H(s,a),我们希望去拟合 H(s,a) 函数。当有了 H(s,a) 之后,就可以根据下面的式子得到策略(我感觉这里的 H(s,a) 和 Q(s,a) 非常像):

于是问题就变为了一个有监督的问题,现在我们有输入 x=(s,a,t_s, t_e),其中 t_s 是 state 的时间,t_e 是 action 的时间,输出是人类的反馈 y = (h, t_f),t_f 是接收到反馈的时间。我们记录这些时间是为了将这个反馈分配到不同的 state 和 action 时候要计算权重使用。于是 loss 函数可以写成下面的样子(问题转换为最小化下面的式子):

其中 w 是对每一个 x=(s,a,t_s, t_e) 和 y = (h, t_f) 的权重的系数。关于 w 的具体形式会在后面的 importance weight 的时候进行介绍。
Deep Reward Model 介绍
上面描述了如何去拟合 H(s,a),这里介绍一下 H(s,a) 具体的结构。由于本文是处理高维的 state,因此作者使用了「神经网络」来进行处理,于是 H(s,a) 如下所示:

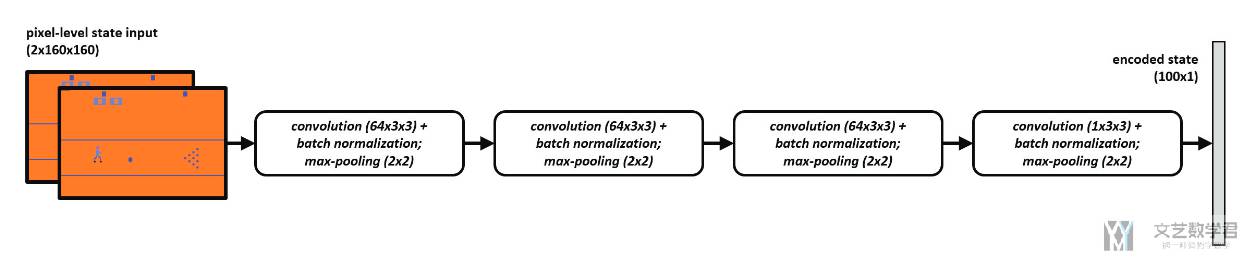
其中 f(s) 是 Autoencoder,可以使用随机的策略收集数据,然后进行预训练。Deep Autoencoder 中 encoder 部分如下所示。用于从输入的游戏画面中提取信息(这部分可以提前进行训练),在后面的训练中,这部分的参数会进行固定:
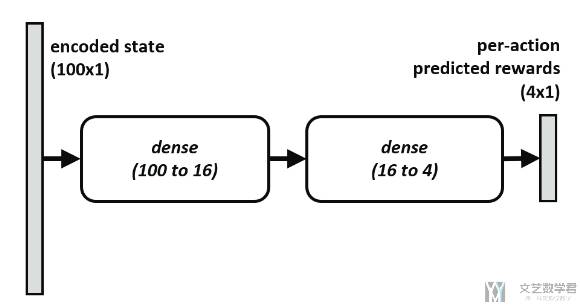
剩下的部分就是一个全连接网络,结构如下所示,可以看到此时的输入是 encoded state,也就是上面网络的输出。接着根据收集的人的反馈进行训练即可。注意这里作者将所有的反馈存储在 Feedback Replay Buffer 里面。
Importance Weights 介绍
在介绍「Human Reward Model」的时候,我们提到在计算 loss 的时候,需要对每一个 x=(s,a,t_s, t_e) 和 y = (h, t_f) 计算权重 w(t_s, t_e, t_f),这一部分我们会详细介绍权重的计算。由于我们获得是一串 (s, a),我们并不知道 human feedback 是给哪一个 (s, a) 的,于是就需要添加一个权重,这个权重需要满足:
- Human trainers intend for their feedback to apply only to recent agent behavior.
w(t_s, t_e, t_f)相当于是一个概率,t_f时刻给的 feedback 是(t_s, t_e)的可能性;- 当
t_f小于t_s的时候,权重是0,相当于feedback不会给后面的动作; - 当
t_f远远大于t_s的时候,权重应该很小;
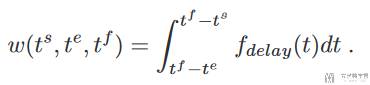
这里 f_delay 作者使用了均匀分布,U(0.2, 4),这样 w 只有在 feedback 前 0.2-4s 之间权重 w 不为 0,其他的权重都是 0。
下面我们来看一个具体的例子,假设在 4s 的时候接收到反馈,人的反映时间差不多是在 1-3s 之间,我们想要计算 0-8s 之间的每个时间分到这个反馈的概率。计算的代码如下所示:
- import scipy
- import numpy as np
- from typing import Tuple
- import matplotlib.pyplot as plt
- from scipy.stats import uniform
- class CreditAssignment():
- """对不同时间的 state 进行打分
- """
- def __init__(self, dist: scipy.stats.rv_continuous):
- self.dist = dist
- def __call__(self, s_start: float, s_end: float, h_start: float) -> float:
- """根据 s_start, s_end 和 h_start 计算对应的权重
- Args:
- s_start (float): state 的时间
- s_end (float): action 的时间
- h_start (float): feedback 的时间
- """
- s_norm_start, s_norm_end = self._normalize(s_start, s_end, h_start)
- start_cdf = self.dist.cdf(s_norm_start)
- end_cdf = self.dist.cdf(s_norm_end)
- return start_cdf - end_cdf
- def _normalize(self, s_start: float, s_end: float, h_start: float) -> Tuple[float, float]:
- s_norm_start = h_start - s_start # 积分上限
- s_norm_end = h_start - s_end # 积分下限
- return s_norm_start, s_norm_end
- if __name__ == '__main__':
- ca = CreditAssignment(uniform(1, 2)) # 反应时间 2s, 例如 4s 时候接收到的反馈, 大概率是反映 1-2s 的结果
- credits = list()
- # feedback = 4s 时候, state 从 0 - 8 对 w 的影响
- for i in np.arange(0, 8, 0.1):
- credit_for_state = ca(s_start=i, s_end=i+.2, h_start=4)
- credits.append(credit_for_state)
- plt.scatter(np.arange(0, 8, 0.1), credits)
- plt.show()
运行上面的代码,可以得到如下的结果。可以看到当接收到 feedback 的时间是 4s 的时候,我们认为这个反馈是给 1-3s 之间的 state 和 action 的。相当于减去 1-2s 的人类反应时间,所以 credit 比较高的点在 1-3s 之间。
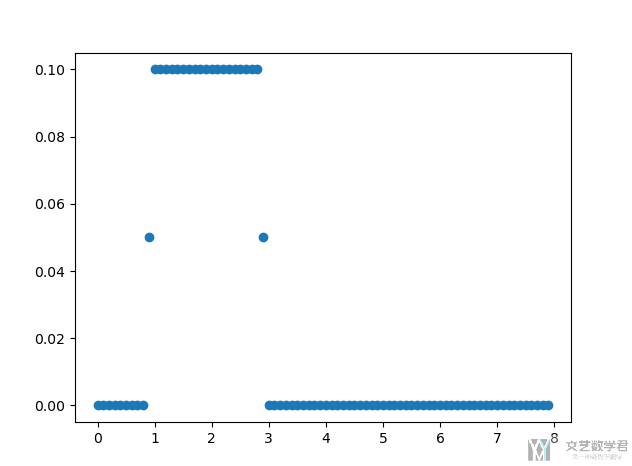
关于这里为什么使用均匀分布 U(1, 3)(这里 scipy 中的 uniform(loc, scale) 是均匀分布 [loc, loc+scale]),作者进行了一个简单的解释。这个与环境有关,这里使用的是 BOWLING 这个环境,通常在 agent 做出动作后 1-2s 内人类才会给出反馈,因为需要根据保龄球撞击的结果进行判断。
实验结果
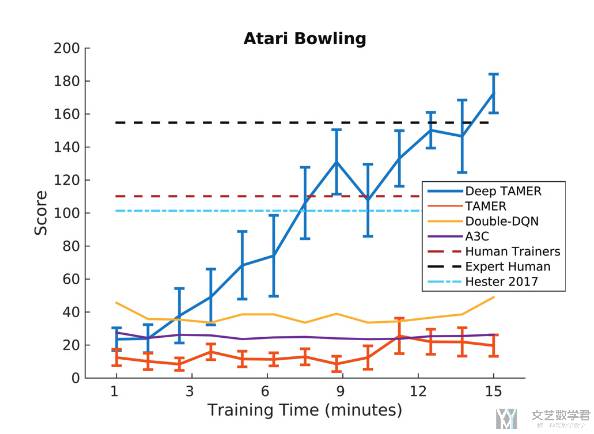
作者的实验在环境 Atari game of BOWLING 上进行。作者和当时性能最好的强化学习算法比较,结果如下图所示,可以看到 Deep TAMER 的平均游戏得分可以高于其他的方法。注意这里作者只训练了 15 分钟,因此 A3C 和 DQN 都是无法很好收敛的。
- 微信公众号
- 关注微信公众号
-

- QQ群
- 我们的QQ群号
-












评论