文章目录(Table of Contents)
简介
这一篇我们介绍关于基于矩阵分解的协同过滤的方法. 基于矩阵的协同过滤有以下的好处:
- Matrix factorization techniques are usually more effective because they allow us to discover the latent features underlying the interactions between users and items.
- Matrix factorization is simply a mathematical tool for playing around with matrices, and is therefore applicable in many scenarios where one would like to find out something hidden under the data.
参考资料
- 矩阵分解在协同过滤推荐算法中的应用
- Matrix Factorization: A Simple Tutorial and Implementation in Python
- 参考的论文解读: [ Paper Summary ] Matrix Factorization Techniques for Recommender Systems
矩阵分解的协同过滤简单介绍
在推荐系统中, 我们有一些用户和一些商品. 这些用户会给这些商品进行打分 (或是用户会对某一个商品进行购买), 我们希望可以预测那些用户没有打分的物品, 用户对这些物品的喜爱程度.
假设现在有5个用户和4个商品, 用户对一些商品进行了打分, 打分分别是1-5. 我们可以将其信息使用矩阵进行保存, 如下图所示, 其中矩阵中的连字符表示该用户没有对这个商品进行评分.
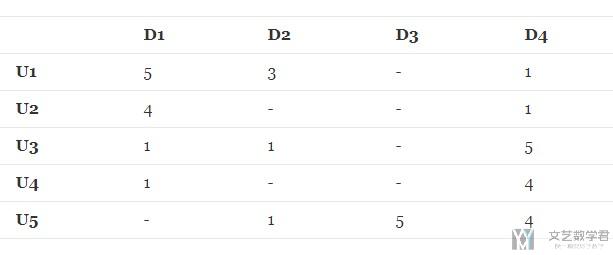
我们的任务就是要预测上面表格中的缺失的数值, 使得这些数值也能给出和矩阵中现有的评级一致的内容.
一些解释
使用矩阵分解的方式来解决这类问题, 我们可以理解为因为有一些隐藏的因素会影响他们的购买决定.
例如, 有两个用户给同一个电影高分, 这可能是因为他们都喜欢动作类型的电影, 而电影是动作类型的. 因此, 如果我们可以发现这些隐藏变量, 我们就可以预测用户对于某个特定的物品的喜爱程度了.
同时, 我们需要假设, 每一个人或物的隐藏变量的个数是小于用户的个数和物品的个数的(因为实际情况下人和物是有很多的). 同时如果这些人与物之间没有共同点, 那么所谓的推荐系统也是没有价值的.
传统的奇异值分解SVD
说到矩阵分解, 我们首先想到了奇异值分解(SVD). 但是传统的SVD无法处理有缺失数据的情况. 如果没有缺失数据, 那么就不需要进行对评分的估计, 从而来进行推荐了. 于是, 我们有了下面的改进算法.
关于SVD的介绍(看一下目录): 矩阵运算与优化算法例题
FunkSVD算法
FunkSVD是对于传统SVD的改进, 使其可以用来解决在推荐系统中的问题. 我们下面进行详细的描述.
- 假设我们有U个用户, D个商品.
- 于是我们有了一个U*D大小的矩阵R, 这个矩阵包含所有用户对商品的评价.
- 我们假设我们有K个隐变量 (latent features)
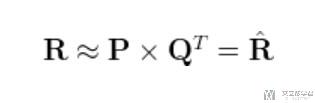
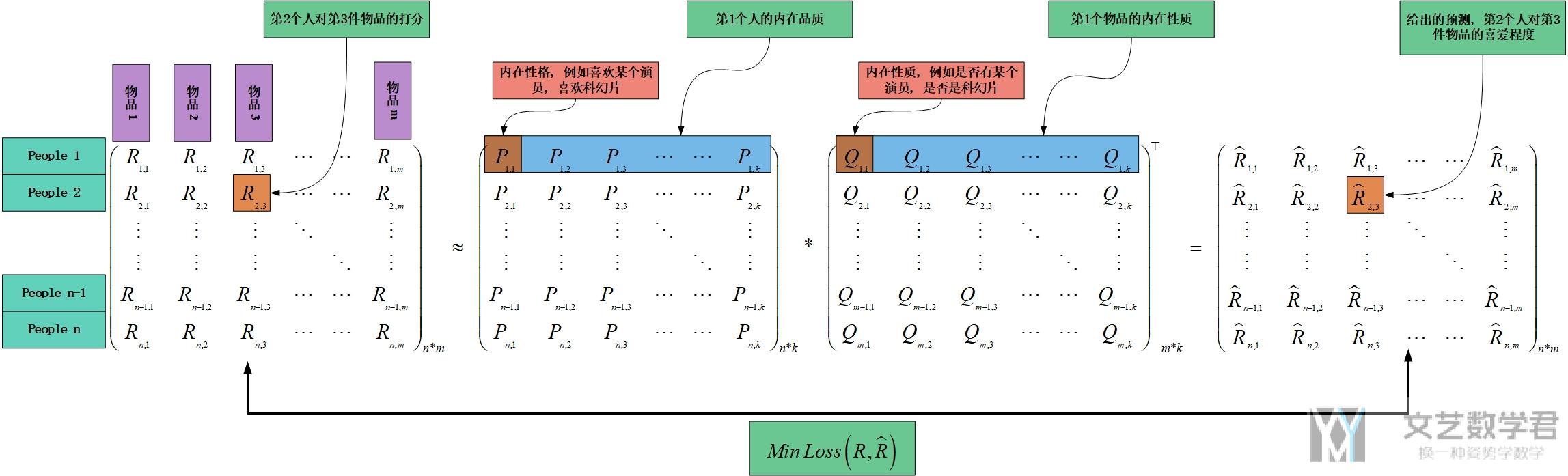
- 我们的任务是, 我们希望可以找到两个矩阵, 矩阵P(U*K大小), 矩阵Q(D*K大小的), 是他们的乘积与原始矩阵R接近. 计算式子如下图所示:
其中:
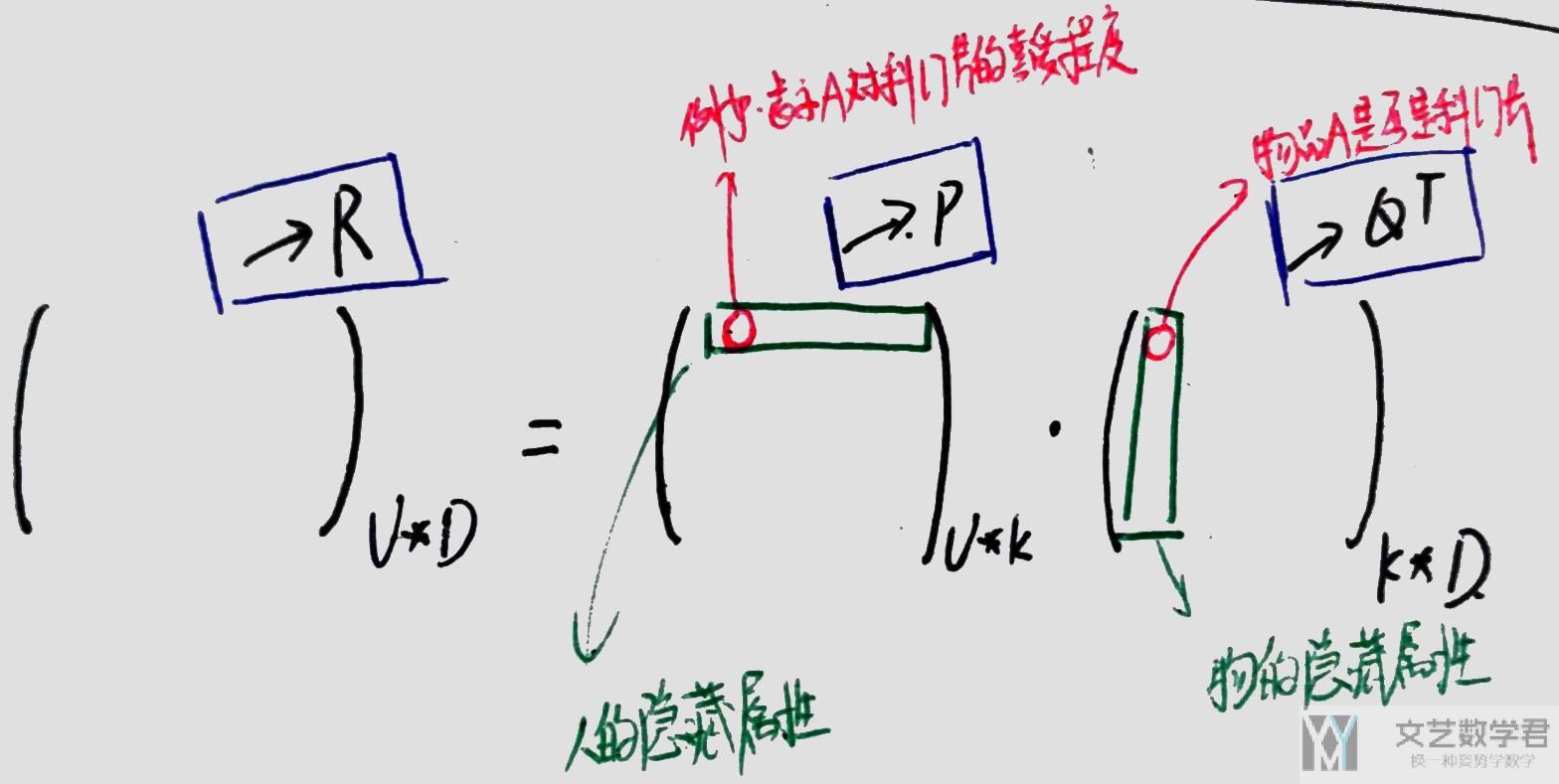
- 矩阵P的每一行代表某个人对于不同特征的热爱程度.
- 矩阵Q的每一行代表某个事物拥有这个特征的程度.
我们使用下面的图进行解释, 例如矩阵P的第一行中第一个元素表示人A对科幻片的喜爱程度(这是一个人的性质), 矩阵Q的第一行第一个元素表示这个物品的科幻片的属性, 是否是科幻片.
我们就是将一个人的隐藏属性与一个物的隐藏熟悉进行相乘求和, 求出人对于这个物品的喜爱程度.
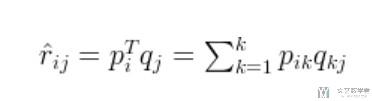
我们将上面的写成向量相乘的方式, 一个人对一个物品的喜爱程度 (例如第i个人对第j件物品的喜爱程度), 可以通过下面的方式进行计算 (矩阵P的第i行, 矩阵Q的第j行, 两者进行相乘):
接下来的问题就是, 我们需要找到一种方法, 可以求出上面的矩阵P和矩阵Q. 我们想到了一种直观的方式, 就是希望使得矩阵P和Q相乘得到的矩阵与原始矩阵R尽可能的接近, 也就是loss尽可能小.
我们可以使用下面的方式来定义他的loss, 我们计算他的预测值与真实值之间的差值(这里我们只考虑观测矩阵R中有的值, 那些unknown的值是不需要进行考虑的):

为了使上面的loss可以最小, 我们使用梯度下降的方法来进行操作. 具体的梯度值可以查看上面的参考资料的第二个链接. (在计算的时候, 可以直接使用Pytorch的自动求导的功能)
下面是一张彩色的图片, 意思和上面要表达的差不多, 可以查看原图.
FunkSVD+Regularization
上面介绍的是比较基础的矩阵分解的算法. 在这个算法的基础上, 会有很多的改进, 一种比较简单的改进就是加入正则化. 加入正则化的目的是希望系数不要太过于复杂, 在矩阵P和Q中不希望有太多太大的数.
下面是加入正则化之后的loss函数:

在实际使用中, 上面的B一般取值在0.02左右. 同样也是使用梯度下降的方法来进行求解.
代码实现
我们在这里使用Pytorch来实现最优解的求值. 完整的代码如下所示:
- import numpy as np
- import pandas as pd
- import os
- import matplotlib.pyplot as plt
- from datetime import date,datetime
- import logging
- import torch
- from torch import nn
- from torch import optim
- from torch.autograd import Variable
- device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
- device
- # --------------------
- # 下面三种计算loss的方式
- # --------------------
- def PredictR(P, Q, R):
- """
- 最基本的FunkSVD
- """
- R_pred = torch.mm(P, Q.t()) # 矩阵相乘
- N,M = R.shape
- loss = 0
- for i in range(N):
- for j in range(M):
- if R[i][j] > 0:
- loss = loss + (R_pred[i][j]-R[i][j])**2
- return loss
- def PredictRegularizationR(P, Q, R):
- """
- FunkSVD+Regularization
- """
- B = 0.02 # 正则话的系数
- R_pred = torch.mm(P, Q.t()) # 矩阵相乘
- N,M = R.shape
- loss = 0
- for i in range(N):
- for j in range(M):
- if R[i][j] > 0:
- loss = loss + (R_pred[i][j]-R[i][j])**2
- loss = loss + B*((P**2).sum() + (Q**2).sum()) # 加上正则项
- return loss
- def PredictRegularizationConstrainR(P, Q, R):
- """
- FunkSVD+Regularization+矩阵R的约束(取值只能是0-5, P,Q>0)
- """
- B = 0.1 # 正则话的系数
- R_pred = torch.mm(P, Q.t()) # 矩阵相乘
- N,M = R.shape
- loss = 0
- for i in range(N):
- for j in range(M):
- if R[i][j] > 0:
- loss = loss + (R_pred[i][j]-R[i][j])**2
- elif R[i][j] == 0: # 下面是限定R的范围
- if R_pred[i][j] > 5:
- loss = loss + (R_pred[i][j]-5)**2
- elif R_pred[i][j] < 0:
- loss = loss + (R_pred[i][j]-0)**2
- loss = loss + B*((P**2).sum() + (Q**2).sum()) # 加上正则项
- # 限定P和Q的范围
- loss = loss + ((P[P<0]**2).sum() + (Q[Q<0]**2).sum())
- return loss
- if __name__ == "__main__":
- # 原始矩阵R
- R = np.array([[5.0, 3.0, 0.0, 1.0],
- [4.0, 0.0 ,0.0 ,1.0],
- [1.0, 1.0, 0.0, 5.0],
- [1.0, 0.0, 0.0, 4.0],
- [0.0, 1.0, 5.0, 4.0]])
- N,M = R.shape
- K = 2
- R = torch.from_numpy(R).float()
- # 初始化矩阵P和Q
- P = Variable(torch.randn(N, K), requires_grad=True)
- Q = Variable(torch.randn(M, K), requires_grad=True)
- # -----------
- # 定义优化器
- # -----------
- learning_rate = 0.02
- optimizer = torch.optim.Adam([P,Q], lr=learning_rate)
- lr_scheduler = torch.optim.lr_scheduler.StepLR(optimizer, step_size=1000, gamma=0.9) # 学习率每20轮变为原来的90%
- # ---------
- # 开始训练
- # ---------
- num_epochs = 5000
- for epoch in range(num_epochs):
- lr_scheduler.step()
- # 计算Loss
- loss = PredictRegularizationConstrainR(P, Q, R)
- # 反向传播, 优化矩阵P和Q
- optimizer.zero_grad() # 优化器梯度都要清0
- loss.backward() # 反向传播
- optimizer.step() # 进行优化
- if epoch % 20 ==0:
- print(epoch,loss)
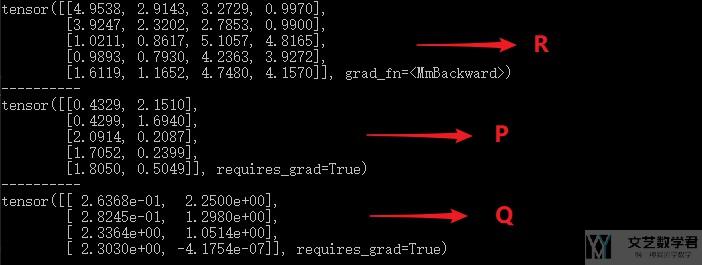
- # 求出最终的矩阵P和Q, 与P*Q
- R_pred = torch.mm(P, Q.t())
- print(R_pred)
- print('-'*10)
- print(P)
- print('-'*10)
- print(Q)
上面有三个函数, 分别对应三种计算loss的方式.
- PredictR: 基本的FunkSVD的思想
- PredictRegularizationR: 基本的FunkSVD+正则化
- PredictRegularizationConstrainR: FunkSVD+正则化+限制R, P, Q的范围, 其中我们希望R的范围在0-5之间, P和Q都可以大于0.
我们使用上面的第三种方式来计算loss, 最后得到我们预测的R如下所示, 可以看到预测的结果还是很不错的.
代码链接: FunkSVD相关代码
BiasSVD算法
这个算法是在上面的算法的基础上加上bias(偏置), 他的想法就是认为人和物有一些固定的因素. 有一些内在的东西. 他包含下面的两种偏置:
- 用户偏置 : 可以看作用户的性格 , 个人的品质等因素
- 物品偏置 : 例如物品的价格 , 物品的质量等
我们看一个下面的例子, 原本使用FunkSVD就是两个矩阵的乘积, 这里需要加上两个常数.

大概就是上面的式子的意思, 我们在这里加上了两个偏置, 分别和人和物有关. 于是loss函数就变成了下面的样子.

- 微信公众号
- 关注微信公众号
-

- QQ群
- 我们的QQ群号
-










2020年8月13日 下午10:03 1F
PyTorch有一些问题而且性能比较慢,建议看https://blog.fastforwardlabs.com/2018/04/10/pytorch-for-recommenders-101.html
2020年8月14日 上午8:22 B1
@ CT0011111123S 我大致看了一下, 他文章最后好像没说Pytorch的一些问题, 他原文是, “We thought PyTorch was fun to use; models can be built and swapped out relatively easily. When we did encounter errors, most of them were triggered by incorrect data types.” (不过这一篇写的非常不错)