文章目录(Table of Contents)
CNN, 卷积神经网络介绍
卷积神经网络一般是由卷积层、池化层和全连接层堆叠而成的前馈神经网络结构。卷积神经网络同样使用反向传播算法进行训练。
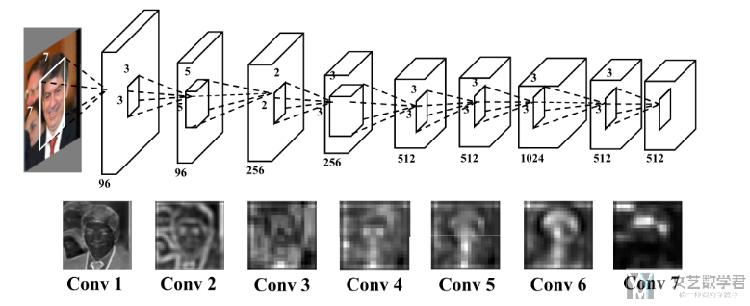
卷积神经网络在逐层学习过程中,会逐步进行学习。第一层学习比较低层的图片结构,第二层学习依据第一层的结果学习高一级的特征,这样最后一层依据前一层学到的高级特征就能完成我们的学习任务。(如下图所示)
文章所有图片来源,都写在最后的参考资料里面了。
CNN为什么适用于图像
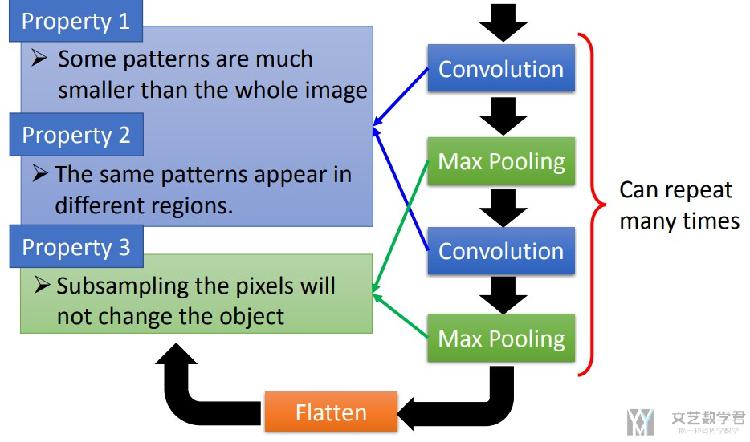
- 有时,在做图像分类的时候,不需要使用整张图片,使用关键部分即可进行检测;
- 关键部分在不同的图像可能会出现在不同的位置;
- 对图像进行放缩(重采样),对视觉效果不会有太大的影响;
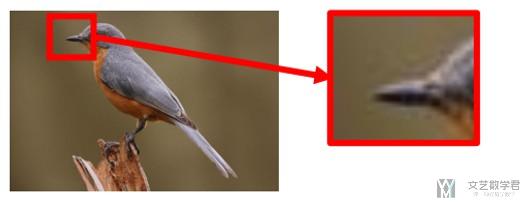
如上图,我们想要检测鸟嘴, 鸟嘴只有原始图像的一小部分. 这个就符合上面的性质一。

如上图,不同图像的鸟嘴的位置不同,符合性质二。
CNN对于图像性质的特殊设定
对于上面说到的三个关于图像的性质,在CNN中分别有Convolution和Pooling与之对应。
- Convolution用来解决上面提到性质1,2
- 每次处理图像的一部分区域
- 会使用同一个filter来检测整个图像
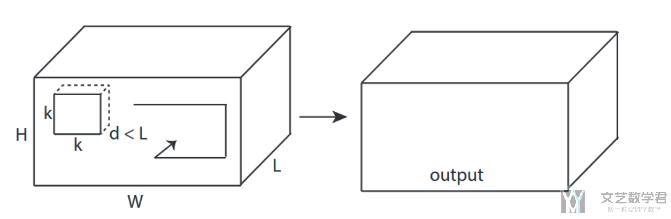
- Pooling用来解决上面提到的性质3
- 例如MaxPooling就是在对图像的缩小
所以,当我们想要将CNN应用到图像以外的领域的时候,需要考虑是否有上面提到的三个性质,是否要对网络进行修改。如可以不使用Pooling。(这个很重要)
下面再详细解释一下卷积层和池化层。
卷积层
图片在计算机中是通过像素矩阵来进行表示的,每一个像素一个数值,范围为0-255。如下图所示,图片矩阵为499*495的矩阵。
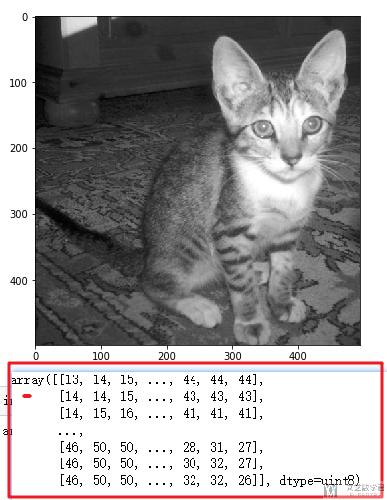
对于彩色照片,我们通常使用RGB三个信道来进行表示,把三个信道进行叠加,就可以看到彩色的照片了。对于上面的图片,如果是彩色的,就会是(499, 495, 3)。
卷积核
内容来源:Machines that can see: Convolutional Neural Networks
首先我们来看一下卷积是如何具体进行运算的。我们有如下的图像矩阵和卷积核。
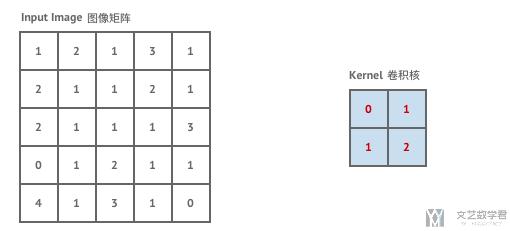
用动图来看一下卷积的过程。
卷积的过程就是一个简单的乘法和加法的过程。如在左上角的时候,我们可以看到计算步骤为:1×0 +2×1+2×1+1×2=6。
一些特定的卷积可以提供相应的功能,如下面的边缘提取算子。详细的可以查看这个链接。图像处理--------应用卷积– 轧花与边缘检测
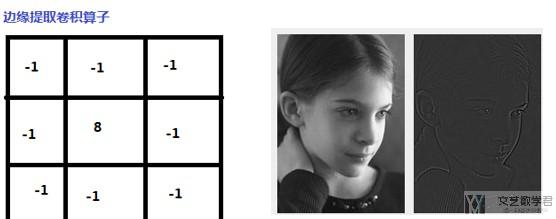
需要注意的是,卷积核中的数字就是网络需要学习的参数。
卷积步长
在上面的动图中,卷积步长(Stride)为1。当然,我们可以设置卷积步长为2。步长变大会提升效率。
下面是卷积步长为1的情况:
下面是卷积步长为2的情况:
边距扩展
边距扩展的由来是因为我们需要控制输出的矩阵的大小。我们会发现,随着卷积步长的增大,输出矩阵在持续变小,于是就有了边距扩展(Padding)的操作。
我们来看一个例子,Half Padding。Half Padding 也叫 Same Padding,它希望得到的输出矩阵尺寸与输入尺寸一致。下图即为我们对5×5的输入矩阵外围补上一圈0后,与3×3的卷积核做卷积运算,最终依然得到5×5的输出矩阵的过程。
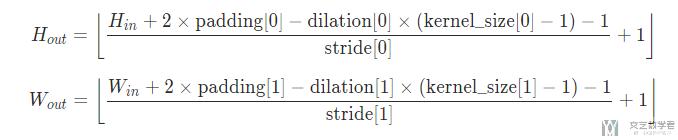
在Pytorch中,padding的计算可以通过下面的公式来得到:
高维多卷积核过程
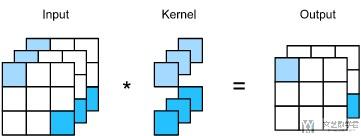
对于彩色图片的三维图像矩阵,如m×n×k的矩阵,我们可以选取a×b×k的卷积核。下面我们举一个例子。(彩色图片的卷积核相当于是一个立方体)
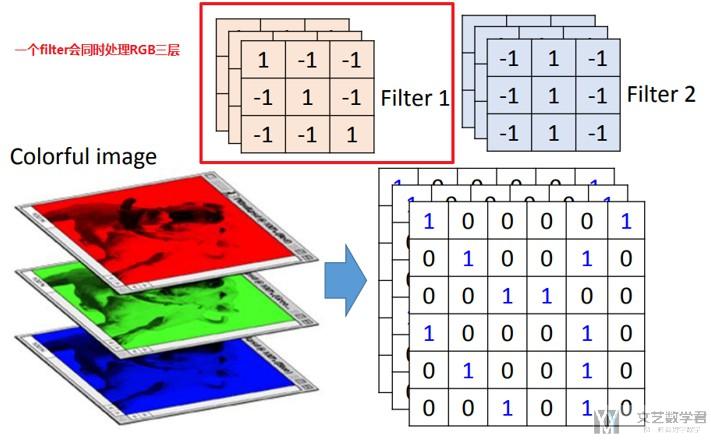
下面输入矩阵为5×5×3,padding=1,stride=2;两个卷积核为3×3×3(相当于是两个正方体, 做卷积操作的时候会对所有的通道同时进行操作);进行卷积后,得到了3×3×2的输出矩阵。(注意下面在进行计算的时候需要加上b0)
下面来看一下计算卷积中使用的参数个数. 如果卷积大小是3, input channel是3, output channel是3. 于是我们可以将一个卷积相成一个三维的正方体, 每次计算3×3×3大小的位置. 因为output channel是3, 所以有3个这样的正方体, 所以参数个数是3×3×3×3=81个. 注意这里是没有bias的.
- a = nn.Conv2d(3, 3, 3, 1, 0, bias=False)
- sum(p.numel() for p in a.parameters())
- """
- 81
- """
还有一类卷积, 他的卷积核大小是1×1, 他的主要目的是改变通道的个数. 例如下面的图所示, 将三通道转换为2通道.
同样看一下卷积大小是1的时候参数的个数. 和上面的思路类似, 参数计算为1×3×3=9.
- a = nn.Conv2d(3, 3, 1, 1, 0, bias=False)
- sum(p.numel() for p in a.parameters())
- """
- 9
- """
PyTorch中的实现
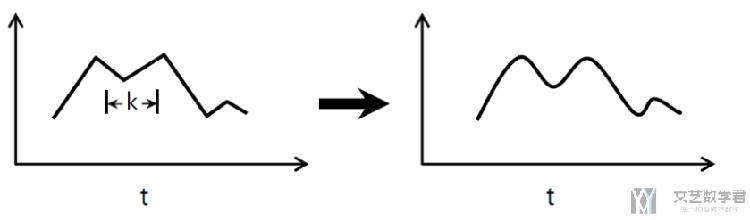
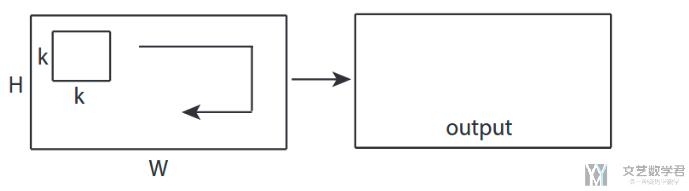
在PyTorch中,分别会有nn.Conv1d,nn.Conv2d,nn.Conv3d,分别对应1D, 2D, 3D卷积,可以看下面的图片。
一维卷积
二维卷积
三维卷积
参考链接 : CNN中的1D,2D和3D卷积是什么意思?
池化层
上面介绍了卷积层,接着介绍卷积神经网络中另一个非常重要的层,也就是池化层。池化操作其实就是降采样操作过程。我们都知道,图片是一个非常大的训练数据,所以想达到很好的训练性能,只有卷积层是不够的。池化层通过降采样的方式,在不影响图像质量的情况下,压缩图片,达到减少训练参数的目的。
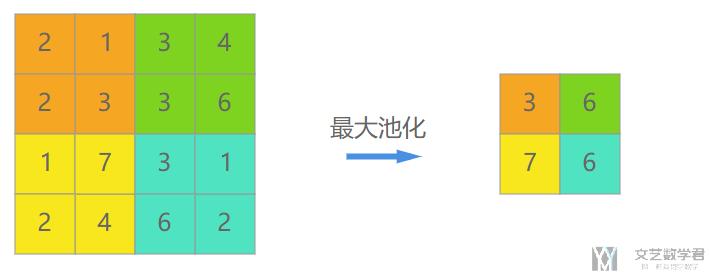
需要注意的是,往往在几个卷积层之后我们就会引入池化层,池化层没有需要学习的参数,且池化层在每一个深度上独立完成,就是说池化后图像的纵深保持不变。下面介绍两种常用的池化方式(直接看图就可以明白,就不解释了)。
最大值池化
平均值池化

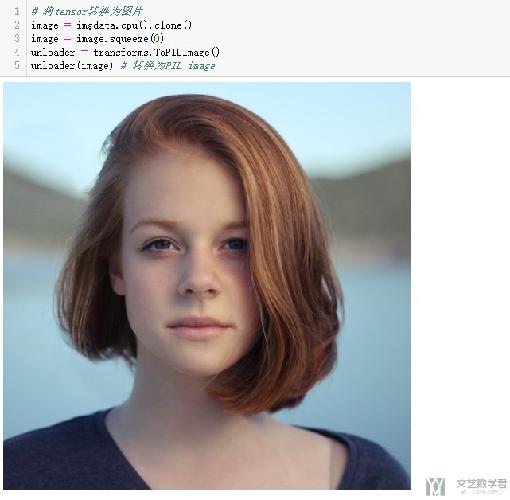
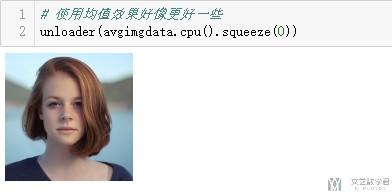
我们可以看一下池化后图片的效果,其实在大体上我们还是可以进行识别的。
这是原始的图像。
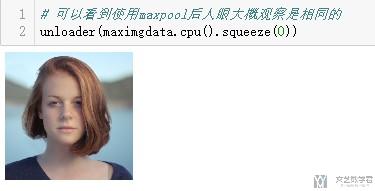
下面是使用MaxPooling之后的效果。
下面是使用AvgPooling之后的效果。
其实简单的理解,Pooling就是对图像实现了放缩的操作。
Unpool与ConvTransposed
关于逆卷积和逆池化的过程,可以查看下面的链接的MaxPool2d 与 MaxUnpool2d和ConvTransposed2d使用介绍的部分。
链接地址:PyTorch使用记录
CNN与Fully-Connected Network的联系
下面看一下CNN与Fully-Connected Network之间的联系。
我们假设原始图像假设为33的图像,Filter为22的filter,如下图所示
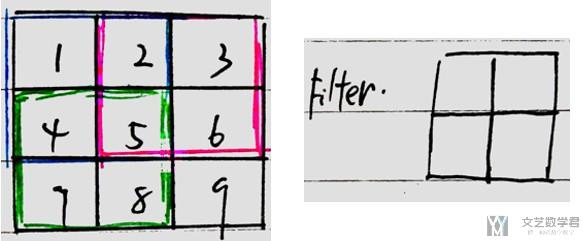
上图中的1,2,3, ...表示方格的序号, 与后面的全连接网络节点的序号对应; 我们将其转换为全链接网络的形式,如下图所示,三种颜色与上面图片中的三种颜色对应。即filter移动了三次。需要注意的是,每次网络只有四个参数要训练,其他都是为0. 同时,移动的过程中, weight是共享的。
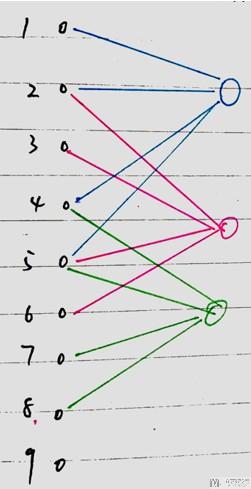
于是,我们可以得到下面的结论:
- Convolution相当于去掉了一些weight;(参数个数减少)
- 同时, Convolution可以实现weight的共享;
PyTorch实现
详细的链接地址如下 : Pytorch_CNN_CAT_DOG
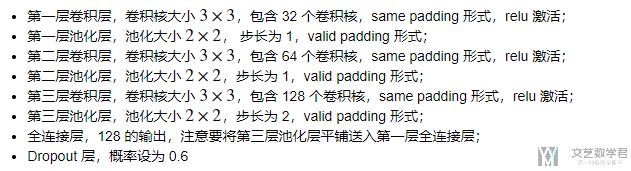
网络结构如下所示:
- class cnn(nn.Module):
- def __init__(self):
- super(cnn, self).__init__()
- # 参数的定义
- # 卷积层+池化层
- self.conv = nn.Sequential(
- # 第一层
- nn.Conv2d(kernel_size=3, in_channels=1, out_channels=32, stride=1, padding=1), # (64, 64, 32)
- nn.ReLU(),
- nn.MaxPool2d(kernel_size=2, stride=1), #(63, 63, 32)
- # 第二层
- nn.Conv2d(kernel_size=3, in_channels=32, out_channels=64, stride=1, padding=1), # (63, 63, 64)
- nn.ReLU(),
- nn.MaxPool2d(kernel_size=2, stride=1), # (62, 62, 64)
- # 第三层
- nn.Conv2d(kernel_size=3, in_channels=64, out_channels=128, stride=1, padding=1), # (62, 62, 128)
- nn.ReLU(),
- nn.MaxPool2d(kernel_size=2, stride=2)# (31, 31, 128)
- )
- # 全连接层
- self.line = nn.Sequential(
- nn.Linear(in_features=123008, out_features=128), # 31*31*128
- nn.Dropout(p=0.6),
- nn.Linear(in_features=128, out_features=2)
- )
- def forward(self, x):
- x = self.conv(x)
- x = x.view(x.size(0), -1) #展开
- x = self.line(x)
- return x
需要注意的只有padding那里的数值。如第一层我们要保持经过卷积运算后图像大小不变,利用上面的公式(在讲边距扩展的时候那里有一个式子),把kernel_size, stride, H(in), H(out)的值确定下来,就能计算padding了。
每一层输出的大小我都标注在旁边了,可以进行查看。
模型的保存于重载
第一种是只保存模型的参数:
- # 只保存模型的参数
- torch.save(Cnn.state_dict(),'cats_dogs_params.pkl')
- # 重载模型参数
- Cnn.load_state_dict(torch.load('cats_dogs_params.pkl'))
第二种是保存整个模型:
- # 保存整个模型
- torch.save(Cnn, 'cats_dogs_params.pth')
- # 加载整个模型
- model = torch.load('model.pth')
其余过程都类似,具体可以看github仓库中的文件。
参考文章
PyTorch文档 : PyTorch文档
The Course of Hung-yi Lee : 台大课程
非常好的入门的一个教材:实验楼机器学习
- 微信公众号
- 关注微信公众号
-

- QQ群
- 我们的QQ群号
-







评论