文章目录(Table of Contents)
简介
自己最近在面试关于强化学习相关岗位的时候, 被问到了如何使用强化学习来解决优化问题, 例如背包问题. 其实之前在看强化学习相关内容的时候, 是从来没有想到这些问题的. 那么正好被问到这个问题, 这一篇文章就主要说一下如何使用强化学习来解决背包问题.
关于详细的代码, 可以查看Github链接: 强化学习解决背包问题.ipynb
参考链接(代码部分参考自这个链接, 主要增加了一些解释): 强化学习解决背包问题
用强化学习解决背包问题
背包问题简介
现在有N个物品, 分别是n1, n2, ...; 他们的重量分别是w1, w2, w3, ...; 每个物品的价值是v1, v2, v3, ...; 现在有一个能承受重量为C的背包. (注意, 每一个物品都只有一个)
问应该如何放入物品, 使得装入包的物品的价值是最大的.
使用强化学习的想法
- state: 包里目前有的物体情况, 例如有物品1和物品2. 最后会保存为'[1,2]', 就表示包里有1号和2号物品.
- action: 有N种物品, 就有N中action. 把物品I放入包中, 就是执行动作I.
- reward: 每放进一个物体, 如果没有超重, reward是物品的value. 如果超重了, reward就是-10, 并且回合结束.
但是还有一个问题是我们需要考虑的, 一个物品被选中后不能选择第二次. 要做到这个要在两个地方进行修改:
- 我们的想法就是从Q-table来入手. 当有新的状态添加到Q-table中的时候(比如现在状态是[1,3]), 我们就将action 1和action 3的位置设置为NaN, 这样在选max的时候, 就不会选到这些action. 这个在下面函数check_state中有进行实现.
- 同时我们还需要修改ϵ-greedy的函数. 因为里面有从所有动作里面随机挑一个, 所以我们要有一个列表, 这里存的是所有在当前state下, 可以挑选的动作. 这个具体的实现在函数mu_policy中进行实现.
具体代码实现
有了上面简单的介绍, 下面我们来具体实现使用强化学习来解决背包问题.
- import pandas as pd
- import numpy as np
- import matplotlib.pyplot as plt
- from time import time
- import plotting
- import itertools
初始化背包
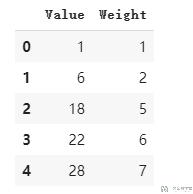
在这个例子里面, 我们的包里面有5种不同的物品, 我们使用dataframe来进行定义. 我们规定重量不能超过11.
- item = pd.DataFrame(data=[[1, 1], [6, 2], [18, 5], [22, 6], [28, 7]], columns=['Value', 'Weight'])
- actions = list(range(len(item))) # 动作, 每一个物体是一个动作
- limit_W = 11 # 背包重量的限制
- gamma = 0.9
下面是5种物品详细的value和weight的介绍.
定义环境
在之前的强化学习的测试里面, 环境都是使用的gym里面的, 这里我们需要自己定义一个环境. 输入的是action和state, 返回reward, 下一个state, 和是否结束(是否超重).
- def envReward(action, knapsack):
- """返回下一步的state, reward和done
- """
- limit_W = 11
- knapsack_ = knapsack + [action] # 得到新的背包里的东西, 现在是[2,3], 向里面增加物品[1], 得到新的状态[1,2,3]
- knapsack_.sort()
- knapsack_W = np.sum([item['Weight'][i] for i in knapsack_]) # 计算当前包内物品的总和
- if knapsack_W > limit_W:
- r = -10
- done = True
- else:
- r = item['Value'][action]
- done = False
- return r, knapsack_, done
策略的定义
其实在Q-Learning中, 我们只需要使用到一个epsilon-greedy的策略来进行环境的探索(在代码实现的时候).
但是因为Q-Learing是off-policy的方法, 实际上是用到两个策略的. 一个策略用来探索, 另外一个用来实际执行. 所以我们在这里定义的时候, 也是定义两个策略.
- μ, 定义ϵ-greedy的策略;
- π, 定义greedy的策略;
下面的ϵ-greedy
- def mu_policy(Q, epsilon, nA, observation, actions):
- """
- 这是一个epsilon-greedy的策略, 返回每一个动作执行的概率, nA为动作的个数
- 其中:
- - Q是q table, 为dataframe的格式;
- - nA是所有动作的个数
- """
- actionsList = list(set(actions).difference(set(observation))) # 可以挑选的动作
- # 看到这个state之后, 采取不同action获得的累计奖励
- action_values = Q.loc[str(observation), :]
- # 使用获得奖励最大的那个动作
- greedy_action = action_values.idxmax()
- # 是的每个动作都有出现的可能性
- probabilities = np.zeros(nA)
- for i in actionsList:
- probabilities[i] = 1/len(actionsList) * epsilon
- probabilities[greedy_action] = probabilities[greedy_action] + (1 - epsilon)
- return probabilities
接着定义greedy的策略, 这个在训练的时候是不会用到的, 只有在实际使用的时候会用到. 实际执行步骤的时候, value based的方法是完全确定的.
- def pi_policy(Q, observation):
- """
- 这是greedy policy, 每次选择最优的动作.
- 其中:
- - Q是q table, 为dataframe的格式;
- """
- action_values = Q.loc[str(observation), :]
- best_action = action_values.idxmax() # 选择最优的动作
- return np.eye(len(action_values))[best_action] # 返回的是两个动作出现的概率
Q-table的检查
因为这里我们使用的是dataframe来存储的Q-table, 所以一旦有一个新的state出现(比如一开始next state就会是未知的state), 此时我们需要更新Q Table. 我们就在这里定义一个函数来实现这个功能. 同时他还需要确保出现的state不能再次被选择, 也就是一个物品不能选两次.
- def check_state(Q, knapsack, actions):
- """检查状态knapsack是否在q-table中, 没有则进行添加
- """
- if str(knapsack) not in Q.index: # knapsack表示状态, 例如现在包里有[1,2]
- # append new state to q table
- q_table_new = pd.Series([np.NAN]*len(actions), index=Q.columns, name=str(knapsack))
- # 下面是将能使用的状态设置为0, 不能使用的设置为NaN (这个很重要)
- for i in list(set(actions).difference(set(knapsack))):
- q_table_new[i] = 0
- return Q.append(q_table_new)
- else:
- return Q
开始更新Q-Table
有了上面的一切准备工作之后, 我们就可开始进行模拟, 并更新Q-Table了, 整体的代码如下, 所有地方我都写了注释了.
- def qLearning(actions, num_episodes, discount_factor=1.0, alpha=0.7, epsilon=0.2):
- # 环境中所有动作的数量
- nA = len(actions)
- # 初始化Q表
- Q = pd.DataFrame(columns=actions)
- # 记录reward和总长度的变化
- stats = plotting.EpisodeStats(
- episode_lengths=np.zeros(num_episodes+1),
- episode_rewards=np.zeros(num_episodes+1))
- for i_episode in range(1, num_episodes + 1):
- # 开始一轮游戏
- knapsack = [] # 开始的时候背包是空的
- Q = check_state(Q, knapsack, actions)
- action = np.random.choice(nA, p=mu_policy(Q, epsilon, nA, knapsack, actions)) # 从实际执行的policy, 选择action
- for t in itertools.count():
- reward, next_knapsack, done = envReward(action, knapsack) # 执行action, 返回reward和下一步的状态
- Q = check_state(Q, next_knapsack, actions)
- next_action = np.random.choice(nA, p=mu_policy(Q, epsilon, nA, next_knapsack, actions)) # 选择下一步的动作
- # 更新Q
- Q.loc[str(knapsack), action] = Q.loc[str(knapsack), action] + alpha*(reward + discount_factor*Q.loc[str(next_knapsack), :].max() - Q.loc[str(knapsack), action])
- # 计算统计数据(带有探索的策略)
- stats.episode_rewards[i_episode] += reward # 计算累计奖励
- stats.episode_lengths[i_episode] = t # 查看每一轮的时间
- if done:
- break
- if t > 10:
- break
- knapsack = next_knapsack
- action = next_action
- if i_episode % 50 == 0:
- # 打印
- print("\rEpisode {}/{}. | ".format(i_episode, num_episodes), end="")
- return Q, stats
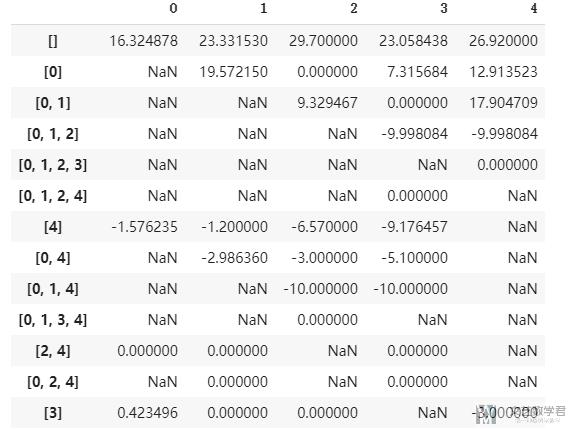
最后我们模拟1000次, 看一下最终的结果:
- Q, stats = qLearning(actions, num_episodes=1000, discount_factor=0.9, alpha=0.3, epsilon=0.1)
最后部分的Q-Table如下图所示, 完整的Q-Table见Github仓库, 里面还包括reward的变化图: 强化学习解决背包问题.ipynb
结果测试
在有了上面的Q-Table之后, 我们看一下实际运行结果是什么样子的.
- # 查看最终结果
- actionsList = []
- knapsack = [] # 开始的时候背包是空的
- nA = len(actions)
- action = np.random.choice(nA, p=pi_policy(Q, knapsack)) # 从实际执行的policy, 选择action
- for t in itertools.count():
- actionsList.append(action)
- reward, next_knapsack, done = envReward(action, knapsack) # 执行action, 返回reward和下一步的状态
- next_action = np.random.choice(nA, p=pi_policy(Q, next_knapsack)) # 选择下一步的动作
- if done:
- actionsList.pop()
- break
- else:
- action = next_action
- knapsack = next_knapsack
最后选择结果是2和3, 此时重量刚好是11, 且价值达到最大, 是40. 以上为使用强化学习来解决背包问题的全部内容.
- 微信公众号
- 关注微信公众号
-

- QQ群
- 我们的QQ群号
-







2021年5月5日 下午4:28 1F
您好,想請問若想解決的是多目標背包問題的話,例如有N個物品要放入P個背包,這個方法是否可行或是能用何種方法解決,謝謝。