文章目录(Table of Contents)
简介
这一篇介绍在Policy Gradient中的Actor Critic Baseline, 也就是常说的A2C. 这一篇的实验环境还是使用Cliff Walking PlayGround, 使用Google Colab完成实验.
这一篇会简单介绍一下Policy Gradient with Baseline的算法过程 (关于具体的推导, 放在之后来讲), 本文会使用Pytorch实现简单的A2C.
参考资料
- 关于本实验的代码, 见Github仓库, 07_Actor_Critic_Baseline_(A2C)_Pytorch.ipynb
- 本实验参考的代码, Pytorch-Actor-Critic.py
- 关于环境的介绍, Reinforcement Learning(强化学习)-Cliff Walking Playground环境介绍
- 关于Pytorch实现DQN的代码, Pytorch实现Deep Q-Learning(Cliff Walking PlayGround)
- 封面图片来源, Reinforcement Learning: How Tech Teaches Itself
Actor Critic Baseline的介绍
Actor Critic是Policy Gradient算法. 他的想法就是希望可以找到一个函数, 来近似Policy, 给这个函数state, 返回的是每一个动作的action. 一般我们会称这个policy为Pi.
为了更新这个策略, 我们需要定义目标函数, 目标函数是希望累计reward尽可能大. 经过化简有以下的形式, 其中Pi(s,a)是用来根据state, 给出action的概率. 除此之外, 我们还需要估计state-action value, 也就是Q值.

为了减少方差, 我们定义了一个advantage function, 为A = Q - V, 目的是保持上面的期望不变, 方差减少. 如下所示, 但是这样有一个问题, 就是我们需要近似三个函数, 分别是Pi, Q, V.
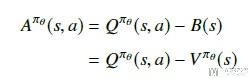
但是, 我们可以证明V的TD误差是上面A的无偏估计. 所以最终的梯度公式可以化简为如下的形式.

其中:

其中Pi和V我们都可以使用神经网络进行代替, 梯度也是可以进行求的. 于是上面的式子就是可以求得. 下面看一下完整的算法流程.
Actor Critic Baseline算法流程
我们把上面的方法稍作归纳, 可以写成下面的形式.
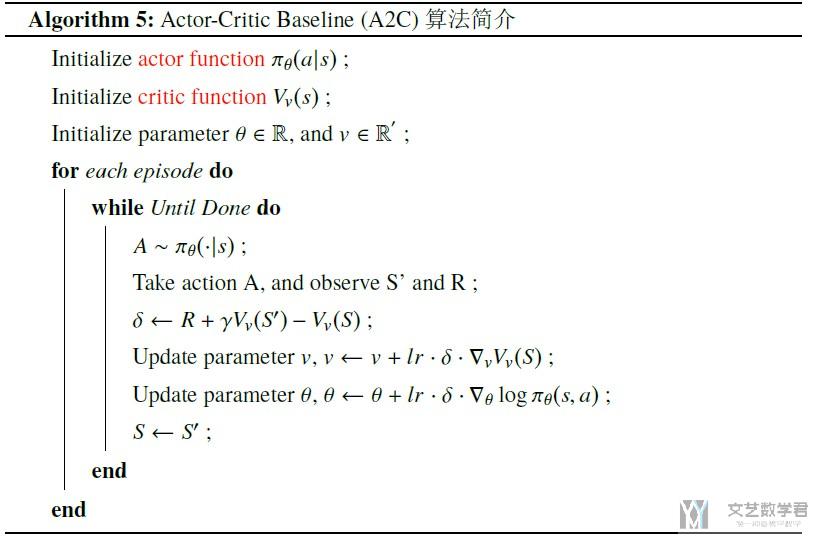
其中:
- 为了更新critic function, 我们设置loss function为(V-Gt)^2, 求导后与上面的式子相同.
- 为了更新actor function, 我们设置loss function为-log_prob * (Gt - V), 这里我们增加负号, 于是可以使用梯度下降来进行参数更新.
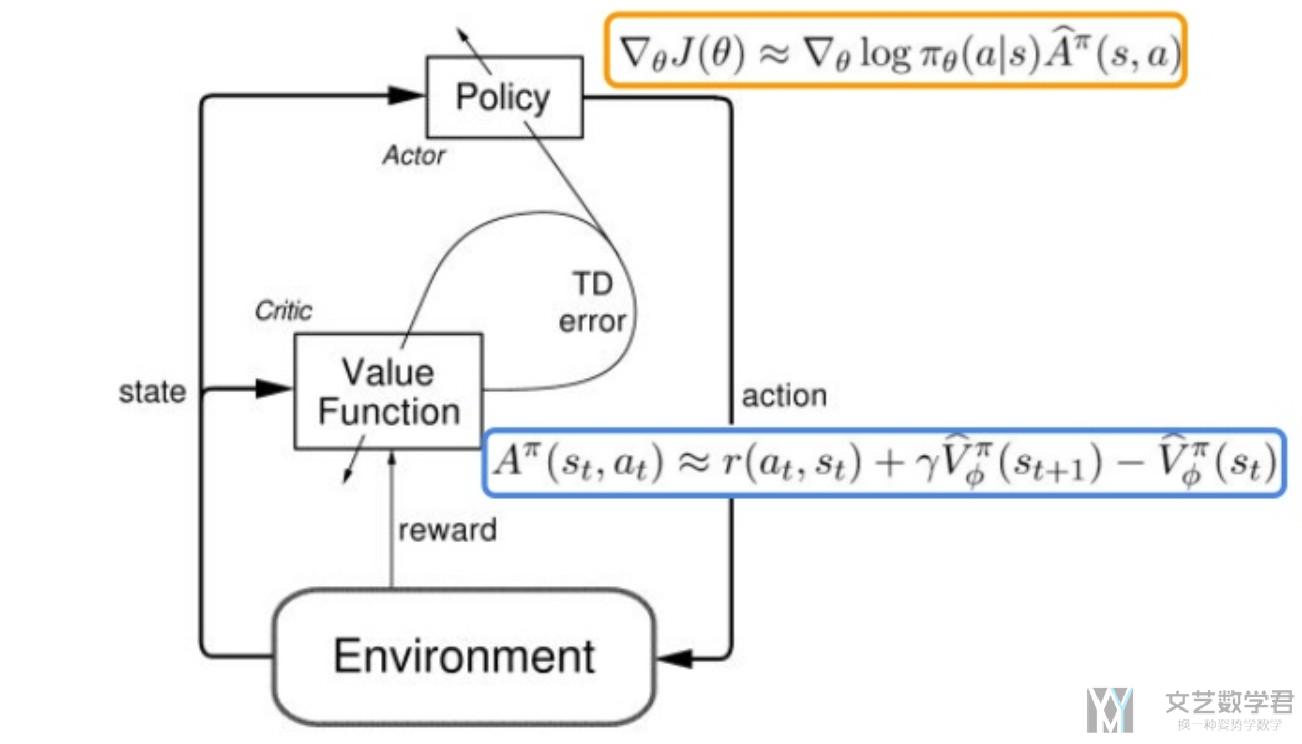
下面是我从Actor critic algorithm看到的, 很好的介绍了算法的流程, 就放在这里做一个总体的参考.
Pytorch实现Actor Critic Baseline (A2C)
这里我们只给出关键部分的代码, 完成的notebook可以查看github仓库,
初始化环境
我们这里还是使用Cliff Walking Playground, 先初始化环境.
- env = CliffWalkingEnv()
接着我们定义一个函数, 来获取当前的state. 因为在Cliff Walking Playground只会返回当前的state, 也就是一个数字, 我们在这里将其转换为one-hot的向量.
- def get_screen(state):
- """这里我们就用state来作为例子, 不直接使用截图了, 将编号转换为one-hot向量, 共48维
- """
- y_state = torch.Tensor([[state]]).long()
- y_onehot = torch.FloatTensor(1, 48) # 产生位置
- # In your for loop
- y_onehot.zero_() # 全部使用0进行填充
- y_onehot.scatter_(1, y_state, 1) # 返回one-hot
- return y_onehot
比如说, 如果环境返回的是state=1, 那么该函数就可以生成如下的向量.
- get_screen(1)
- """
- tensor([[0., 1., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0.,
- 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0.,
- 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0.]])
- """
定义Actor Critic的模型
首先我们简单来看一下Actor和Critic这两个模型的输入和输出.
- Actor模型的输入是state, 输出是每一个action的概率.
- Critic模型的输入是state, 输入是这个state对应的value.
所以这两个模型的输入部分都是对state的处理, 所以我们可以将这两个网络的前几层进行共享. 下面我们定义模型, 定义在一个class里面, 输出部分由两个部分组成.
- class ActorCriticModel(nn.Module):
- def __init__(self):
- super(ActorCriticModel, self).__init__()
- self.fc1 = nn.Linear(48, 24)
- self.fc2 = nn.Linear(24, 12)
- self.action = nn.Linear(12, 4)
- self.value = nn.Linear(12, 1)
- def forward(self, x):
- x = F.relu(self.fc1(x))
- x = F.relu(self.fc2(x))
- action_probs = F.softmax(self.action(x), dim=-1)
- state_values = self.value(x)
- return action_probs, state_values
于是, Actor模型和Critic模型的结构分别如下:
- Actor模型的结构是, 48->24->12->4;
- Critic模型的结构是, 48->24->12->1;
前面两层的参数是共享的. 这个网络的输出有两个, 一个是actor模型的返回, 每个action的概率, 另一个是这个state的value值. 我们简单看一下这个网络的返回.
- ac = ActorCriticModel()
- action_probs, state_values = ac(get_screen(1).squeeze(0))
- print(action_probs)
- print(state_values)
- """
- tensor([0.2140, 0.3271, 0.2130, 0.2459], grad_fn=<SoftmaxBackward>)
- tensor([-0.3331], grad_fn=<AddBackward0>)
- """
模型的训练
在这里我们使用MC的方式来进行训练. 我们会完成一个完整的episode, 这个时候可以获得如下的一组数据:
- 当前state的累计收益(Gt, 这个是实际计算的);
- 对当前state收益的估计(V值);
- 当前state采取一个action的概率的log值, 即对应下面代码中的log_probs;
接着, 我们可以计算actor loss和critic loss. 这两个loss的计算分别如下:
- critic loss = (V-Gt)^2, 也就是希望我们对状态state的价值估计与其实际价值相似.
- actor loss = -log_prob * (Gt - V), 我们称作Gt-V为advantage function.
于是, 将上面的想法合起来, 就组成了下面的代码.
- def trainIters(env, ActorCriticModel, num_episodes, gamma = 0.9):
- optimizer = torch.optim.Adam(ActorCriticModel.parameters(), 0.03) # 注意学习率的大小
- scheduler = torch.optim.lr_scheduler.StepLR(optimizer, step_size=10, gamma=0.9)
- # 记录reward和总长度的变化
- stats = plotting.EpisodeStats(
- episode_lengths=np.zeros(num_episodes+1),
- episode_rewards=np.zeros(num_episodes+1))
- for i_episode in range(1, num_episodes+1):
- # 开始一轮游戏
- state = env.reset() # 环境重置
- state = get_screen(state) # 将state转换为one-hot的tensor, 用作网络的输入.
- log_probs = []
- rewards = []
- state_values = []
- for t in itertools.count():
- action_probs, state_value = ActorCriticModel(state.squeeze(0)) # 返回当前state下不同action的概率
- action = torch.multinomial(action_probs, 1).item() # 选取一个action
- log_prob = torch.log(action_probs[action])
- next_state, reward, done, _ = env.step(action) # 获得下一个状态
- # 计算统计数据
- stats.episode_rewards[i_episode] += reward # 计算累计奖励
- stats.episode_lengths[i_episode] = t # 查看每一轮的时间
- # 将值转换为tensor
- reward = torch.tensor([reward], device=device)
- next_state_tensor = get_screen(next_state)
- # 将信息存入List
- log_probs.append(log_prob.view(-1))
- rewards.append(reward)
- state_values.append(state_value)
- # 状态更新
- state = next_state_tensor
- if done: # 当一轮结束之后, 开始更新
- returns = []
- Gt = 0
- pw = 0
- # print(rewards)
- for reward in rewards[::-1]:
- Gt = Gt + (gamma ** pw) * reward # 写成Gt += (gamma ** pw) * reward, 最后returns里东西都是一样的
- # print(Gt)
- pw += 1
- returns.append(Gt)
- returns = returns[::-1]
- returns = torch.cat(returns)
- returns = (returns - returns.mean()) / (returns.std() + 1e-9)
- # print(returns)
- log_probs = torch.cat(log_probs)
- state_values = torch.cat(state_values)
- # print(returns)
- # print(log_probs)
- # print(state_values)
- advantage = returns.detach() - state_values
- critic_loss = F.smooth_l1_loss(state_values, returns.detach())
- actor_loss = (-log_probs * advantage.detach()).mean()
- loss = critic_loss + actor_loss
- # 更新critic
- optimizer.zero_grad()
- loss.backward()
- optimizer.step()
- print('Episode: {}, total steps: {}'.format(i_episode, t))
- if t>20:
- scheduler.step()
- break
- return stats
上面代码可以说是由两个部分组成的:
- 对于每一个episode, 我们都进行模型, 使用actor生成动作, 并使用critic得到对state的评价, 将其分别存入数组中.
- 当一个episode结束后, 我们根据返回的reward, 分别计算每一个state的累计reward. 也就是上面
for reward in reward[::-1]部分的代码. 接着就是计算两个的loss, 并进行反向传播, 更新网络参数.
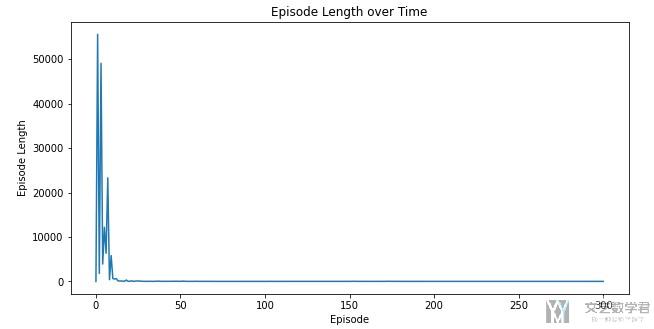
大概可以在20个episode之后模型收敛.
一些注意点
上面的代码中, 有几个小的tricks, 在这里说明一下. 第一个是一定要对returns进行归一化处理. 也就是下面这句语句.
- returns = (returns - returns.mean()) / (returns.std() + 1e-9)
如果去掉之后, 好像是不能收敛的.
第二个是关于计算Gt的时候, 如果已经是tensor的格式, 不能使用简写符号, 这样会使得内存共享, 导致最后returns数组里的结果是完全一些的. 也就是不能写成下面的形式>
- Gt += (gamma ** pw) * reward,
需要写成下面的形式, 这一这里说的情况是reward已经是tensor的格式了.
- Gt = Gt + (gamma ** pw) * reward
- 微信公众号
- 关注微信公众号
-

- QQ群
- 我们的QQ群号
-







评论